PAACADEMY offers advanced online fabrication workshops for architects, covering robotic fabrication, concrete casting and programmable acoustic panels using computational tools like Grasshopper, KUKA PRC and industrial robots.
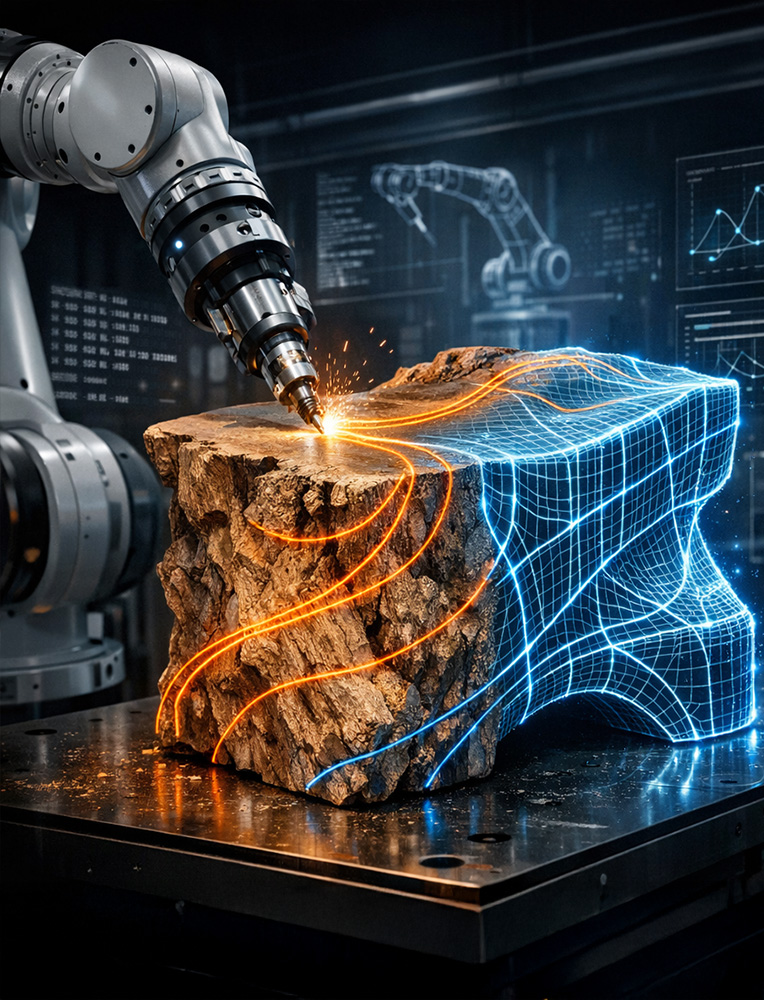
PAACADEMY's Fabrication workshops move from digital geometry to physical material across robotic systems, concrete, fiber and acoustic construction. Robotic Fabrication for Irregular Geometry uses Rhinoceros 3D, Grasshopper 3D, industrial robots and Google Colab to develop fabrication workflows for non-standard geometry, covering programming logic and toolpath generation for architectural-scale robotic production.
Robotic Fabrication Simulation extends this into Grasshopper 3D, Unreal Engine and offline simulation tools to validate robotic movements before actual execution. These courses bridge the gap between parametric design and physical construction, giving architects the technical skills to control industrial robotic arms, manage subtractive/additive manufacturing processes and execute complex geometric assemblies at full scale.